Wkb Chapter 7a
Lecture Notes on
Momentum & Impulse
Definition: Momentum (designated P for some sicko reason)
= mv
Definition: Impulse (denoted by I ! ) = chg in P = mv - mvo = ∆ P
notice ∆P/∆T = m∆v/∆t = m ∆v/∆t = m a = Favg
I = ∆P = Favg ∆T but if F varies I = ∆P = ∫F dt or Finst = dP/dt (original def. of F)
LAW OF CONSERVATION
OF MOMENTUM - COMES FROM NEWTONS 3RD
F12 ∆t = -F 21 ∆t
∆ P1 = -∆P2
m1 v1
- m1
v10 = - (m2
v2 - m2 v20) = m1 v1 + m2 v2 = m1 v10 + m2 v20
P = ∑Pi
= Po = ∑ Pio
Collisions 2 Kinds
Def. Perfectly in elastic collisions - hit and stick. Pf = Po
(m1 + m2)
vf = m1
v10 + m2 v20 etc.
Def. Perfectly elastic collisions - hit and bounce off so
that Kinetic Energy is conserved.
so ![]()
![]()
Discuss what happens when
m1 = m2 ?
get out the moon &
Earth, the horse and the roller thing.
Center of Mass - The
point of balance - How to find it:
Center of mass of an object, or set of
objects is the balance point for this object(s). To discuss this we really must introduce a related
topic; Torque. Torque can be thought of as the tendency to make something rotate
and officially, t r x F, where r is the distance from the pivot
point (called the moment arm), and F is the force and x
represents the cross product (Later).
Perspective:
Velocity v is the rate of change of
distance w.r.t. time. Force F is a
measure of an objects tendency to change velocity. Angular velocity about some axis of rotation is the rate of change of angle w.r.t.
time.
Torque about some axis of rotation is a
measure of an objects tendency to change angular velocity.
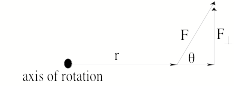
Definition:
The magnitude of Torque t = r F , where
r(called the moment arm), is the
distance from the axis of rotation, to the point of application of force, and F is the component of force perpendicular to the moment arm. F = Fsin q, where q is the angle
between the direction of r and the direction of F.
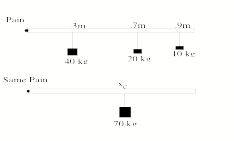
Now suppose we have a meter stick with
masses attached like so. Pain is caused by torque
t@0
The center of mass of this system of
objects is the balance point of the stick, but it is also the point at which
all the mass could be located to get equivalent torque.
i.e.
∑migxi = mTgxcm , or xcm
= (∑mixi)/mT
Now suppose we had a set of point masses
located in a two dimensional plane.
The xcm and ycm could be found independently of
one another in exactly the above fashion, so, ycm = (∑miyi)/mT
Do example here with the set of mass
points 2 kg at (-5,-2), 5 kg at (-2,2), 4 kg at (2,3), and 3 kg at (5,1).
Furthermore, if we wanted to obtain the
center of mass of a two dimensional object, we could approximate its center of
mass by dividing it up into
rectangles, using the center of each rectangle as the center of mass of that
rectangle, then obtain xcm and ycm as above. Then, in typical analytical fashion, we
could take the limit as the number of rectangles goes to ∞, and bingo, we have
another integral! 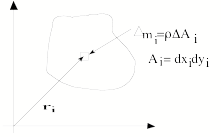
So, for planar objects, ![]() and
and ![]()
Now for a two dimensional object density r = mass/area = m/A= dm/dA
If we assume uniform density, then the
density cancels out and we can just talk about the center of a plane region
(called the Centroid of that region), in which case, the dm's above become
dA's.
dA = dx dy, ri = xii + yij so rcm = (xcm , ycm), where
∫Axc
rdx dy
∫A yc dx dy
xcm = ------------ and ycm =
---------------- and xc
and yc
∫A rdx dy
∫A dx dy
are expressions of the center of mass of
the arbritrary mass point dm.